Basic Concept of Density-Based Clustering
Major features
- 임의의 모양에 대한 clustering이 가능 (arbitrary shape)
- noise 조절
- 1번만 조회 (one scan)
- 종료 조건으로 density parameter가 필요함
density-based clustering으로 DBSCAN, OPTICS, DENCLUE, CLIQUE 등이 있고 DBSCAN에 대하여 알아보자.
DBSCAN
Density-Based Spatial Clustering of Applications with Noise
DBSCAN 알고리즘은 2014 KDD test of time award를 수상했다.
- arbitrary shape
- robust to noise
- scales well to large databases
Two parameters
Eps (Epsilon): Maximum radius of the neighborhood
MinPts (Min-Points): eps-neighborhood 안에 있어야 하는 point의 최소 개수
eps-neighborhood은 다음과 같이 집합의 형태로 표기한다.
\[ N_{eps}(p) = \{ q \in D \mid dist(p, q) \le Eps \} \]
Directly density-reachable (직접 밀도 도달가능)
$p$가 두 조건($p$가 $q$의 반경안에 있고, $q$가 core point)을 만족하면 directly density-reachable 하다고 한다.
아래 그림을 예시로 들면, (1) $p$는 $q$의 이웃반경 안에 존재하고, (2) $N(q)$의 크기는 minpoint=5 보다 크기 때문에 $q$는 core-point이다. 따라서 $p$는 $q$로부터 직접밀도 도달가능한 관계이다.

- $p \in N_{eps}(q)$
- Core Point Condition: $\left| N_{eps}(q) \right| \ge MinPts$
Density-reachable (밀도 도달가능)
$q=p_1, p_2, \dots, p_{n-1}, p_n=p$에 대하여 $p_{i+1}$이 $p_{i}$로부터 직접밀도도달가능하면, $p$는 $q$로부터 밀도 도달가능하다고 한다.

Density-connected (밀도 연결)
$p$와 $q$ 모두 어떤 점 $O$로부터 density-reachable하면 $p$는 $q$와 밀도연결되었다고 한다.

Basic Concepts
(하나의) Cluster는 density-connected points의 극대 집합(maximal set)이다.
Border: Cluster에 속하지만 Core는 아니다. (MinPts를 만족하지 못한다.)
Outlier (Noise): 어떠한 클러스터에도 속하지 않는다.


DBSCAN Algorithm
- 임의의 점 $p$를 선택한다.
- $p$로부터 density-reachable한 모든 점을 모은다.
- $p$가 core point라면, 클러스터가 형성된다.
- $p$가 border point라면 모든 점들이 $p$로부터 density-reachable하지 않으므로, 다음 point에 대하여 DBSCAN 알고리즘을 다시 시행한다.
- 모든 점이 process될 때까지 반복한다.

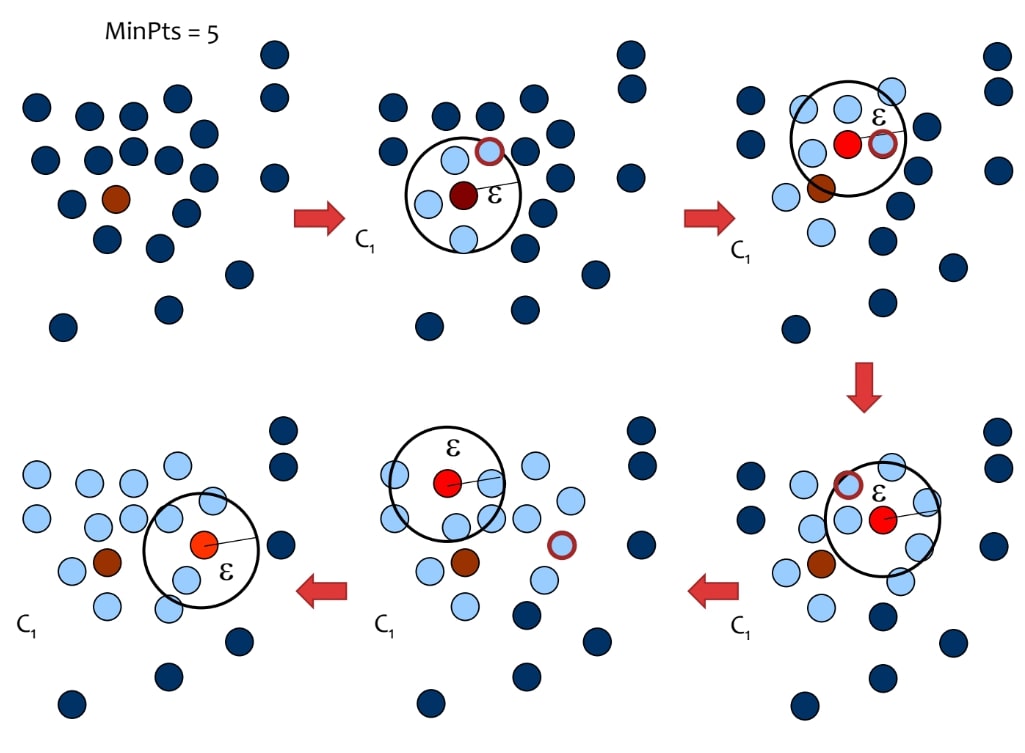
DBSCAN Execution Example
 epsilon=2이고 min-points=3으로 미리 파라미터가 세팅되어있고, 분홍색 점들은 아직 classified되지 않은 점들이라 하자. |
 현재 점($p_1$)을 붉은색이라 하고 이웃반경 $N_{2}(p_1)$를 녹색이라 하자. $\left| N_2(p_1) \right|=3$이므로 $p_1$은 core point이다. density-reachable한 점들을 모으면 녹색이므로 $p_1$은 클러스터 $c_1$으로 분류한다. |
 $\left| N_2(p_2) \right|=4$이므로 $p_2$은 core point이다. density-reachable한 점들은 녹색이고, $p_2$ 역시 같은 클러스터 $c_1$으로 분류한다. |
 $\left| N_2(p_3) \right|=5$이므로 $p_3$은 core point이다. density-reachable한 점들은 녹색이고, $p_3$ 역시 같은 클러스터 $c_1$으로 분류한다. |
  (생략) |
 unvisited(unclassified) point에서 새로 시작한다. 이 점($p_6$)은 $\left| N_2(p_6) \right|=1$이므로 core point가 아니다. 따라서 NOISE(outlier)로 분류한다. |
 $\left| N_2(p_7) \right|=3$이므로 $p_7$은 core point이다. density-reachable한 점들은 녹색이고, $p_7$은 새로운 클러스터 $c_2$로 분류한다. |
 $\left| N_2(p_8) \right|=3$이므로 $p_8$은 core point이다. density-reachable한 점들은 녹색이고, $p_8$은 클러스터 $c_2$로 분류한다. |
  (생략) |
 (생략) 마지막 점 역시 $c_2$로 분류한다. 최종적으로 2개의 cluster를 형성했고, 한 점은 outlier로 남아있다. |
Remarks
Complextity
일반적으로 $O(n^2)$이지만 2차원 데이터에서 index를 사용하면 $O(n \log n)$도 가능하다.
Note: 원 논문에서는 index를 사용하면 $O(n \log n)$이라 주장했으나 후속 논문에 의해 $dim \le 2$ 조건이 필요함이 추가되었다.
Advantages
- cluster 개수를 지정할 필요가 없다. (k-means는 클러스터 개수 $k$를 직접 지정해야 했다.)
- 어떤 모양의 데이터든지 cluster를 형성할 수 있다. (k-means는 구 모양 처럼 convex-shaped만 가능했다.)
- noise를 다룰 수 있다
- data point의 순서에 영향을 받지 않는다. (BIRCH 알고리즘은 순서에 영향을 받는다.)
Disadvantages
- 파라미터(eps, MinPts)의 적절한 값을 찾기 어렵다.
- density가 많이 차이나는 데이터에는 적절하지 않다.
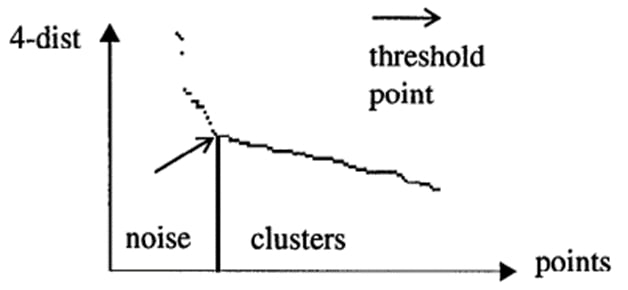
Determining the Parameters
DBSCAN 논문의 저자들은 heuristic한 방법을 제시했다.
thinnest cluster를 형성하는 parameter를 찾는 아이디어에서 착안했다.
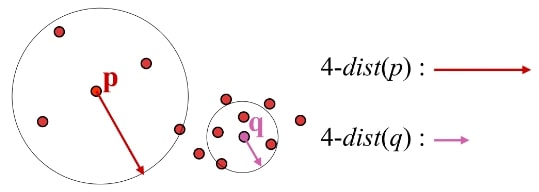
Heuristic method
$k-dist$: 각 점마다 $k$-nearest neighbor를 형성하는 최소 거리
MinPts: 고정된 값을 사용한다. 특히 2차원 데이터에 해아여 $4$를 이용할 것을 권장한다.
Eps: MinPts-dist 그래프에서 첫번째 꺾인 점(first valley)로 한다.
'스터디 > 인공지능, 딥러닝, 머신러닝' 카테고리의 다른 글
| [Clustering] Cluster Evaluation (silhouette coefficient, proximity matrix, clustering tendency) (0) | 2023.06.03 |
|---|---|
| [CS224w] Dataset Split (0) | 2023.05.29 |
| [CS224w] Training Graph Neural Networks (0) | 2023.05.24 |
| [Clustering] BIRCH Algorithm (0) | 2023.05.23 |
| [Clustering] Hierarchical Clustering (계층적 군집화) (0) | 2023.05.22 |



